 |
Multiview is a system for displaying multiple distinct views on a single screen. It can be used to provide spatially-faithful video-conferencing for natural eye contact and deixis. It can also be used to provide many views for walk-around inspection of architectural models or other 3D designs. Inter-image spacing ranges from many degrees to a fraction of a degree. |
 |
Activity-Based Computing (ABC) explores the role of activities in shaping behavior. Activities are patterns of particular people, documents, tools, places, calendar times etc. Probabilistic models are used to build activity maps from low-level log data about email, document use, web browsing etc. Private computation is used so this log data is never exposed. ABC can be used for proactive document sharing, proactive retrieval, disambiguation, and other contextualization tasks. |
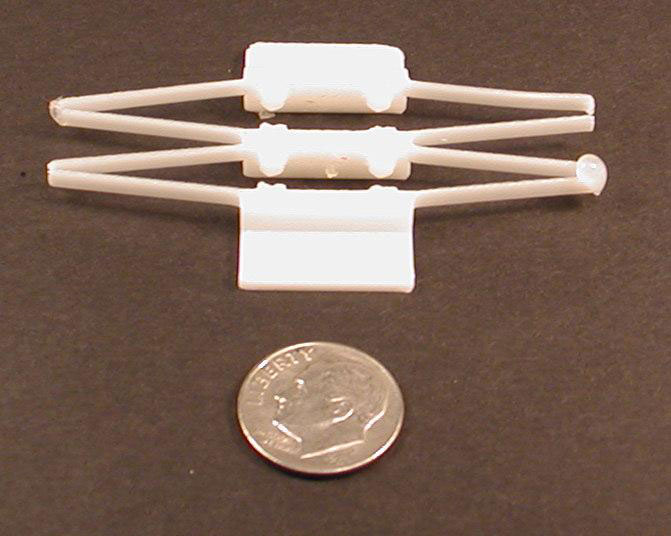 |
Flexonics
is a new class of mechatronic devices that differ from their
traditional counterparts in both fabrication and design. Our goal is
to build fully functional mechatronic devices without assembly. These
devices will integrate structural, mechanical, and electronic
components during fabrication using an all inkjet printing process.
Our focus is on high-performance dielectric actuators.
|
 |
Ubicomp Privacy aims to develop new tools and techniques for privacy in a variety of situations including: collaborative work, smart spaces, and location-aware services. We are particularly interested in techniques that control how information is used, not just who has access to it. The goal is to develop provably strong (cryptographic and information-theoretic) protocols that are practically realizable. |
 |
TinyMotion is a software-only mouse pointer for cameraphones. Tinymotion uses computer vision to estimate the motion of any scene the camera is pointing at. On a fixed background, it estimates the camera's motion relative to the background. A stream of images are captured from the camera, and image displacements are computed in real-time. The pointer data can be used for games, for map browsing, or for any other mouse-like pointing function. |
 |
Livenotes is a practice and a technology for small-team collaborative learning in regular lecture classrooms. Livenotes uses wirelessly-networked PDAs or Tablet-PCs to allow students to take notes and annotate lectures collaboratively and in real-time. It leverages the power of small-group learning and integration of student, team-mate and lecturer perspectives (multi-vocality). |
 |
HCC is a research consortium on Human-Centered Computing. It comprises faculty from computer science, sociology, psychology, SIMS, education, business, linguistics, electrical and mechanical engineering. HCC's goal is to design information systems into human contexts, and to better understand those contexts using computational tools. |
 |
UPM: A universal planar manipulator. Amazingly enough, planar vibration of a rigid plate is enough to independently move many objects on the plate in any direction. Here's the gadget that does it. Principal architect is Dan Reznik, who graduated in 2000 and moved to Siemens TTB in Berkeley. We are continuing to develop the UPM adding a Jini API to make it available as a smart desk for the smart room (411 Soda) |
 |
PRoPs: A PRoP is a Personal, Roving Presence. Think of a physical (robot) avatar. The research challenge in social tele-robotics is understanding the physical cues exchanged by embodied actors during face-to-face communication. Our goals are better online communication, persuasion and trust-building in that order. The photo shows PRoP designer Eric Paulos and two remotely-embodied friends. |
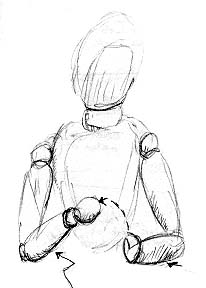 |
Cursive: is an expressive interface for control of avatar gesture. The challenge with real-time avatar control is to achieve a rich vocabulary of gestures which is also modulated by affective (emotive) traits. Our goal is to do so with today's input devices. Our solution uses pen gesture. Users draw a character which indexes a recorded gesture. Analog traits of the hand-written character modulate the final gesture to produce an infinite variety of nuanced movements. |
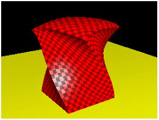 |
Real-time FEM modeling with global deformation. This is a full non-linear FEM system that can simulate soft models with 1000s of nodes in real-time. The system was designed for surgical and creature simulation where deformations exceed the linear range. Includes collision response for sliding contacts. Work of Yan Zhuang, who graduated in May 2000 and moved to Qualcomm. |
 |
3DDI was a project on 3D visualization and direct manipulation of virtual objects. It was a Multidisciplinary University Research Initiative (MURI) project supported by BMDO and ONR. 3DDI involved 7 faculty from Berkeley, 2 from MIT, and 1 from UCSF. I worked on modeling of deformable objects, on real-time laser depth scanning and on volumetric LCD displays. |
 |
IMPULSE is an impulse-based rigid body simulator. Impulse was developed by Brian Mirtich and extended by Francesca Barrientos to support control/behavior scripts in Java. |
Authority in information management and referral systems. Work by Heyning Cheng. Here is his MS report.
APU: APU is a set of Algebra Programming Utilities, developed by Ashu Rege. Target applications are computational geometry (especially non-linear geometry) and geometric modeling. Its available for free download.
Ioannis Emiris maintains a repository of geometry algorithms including his Berkeley implementations of any-dimensional convex hull, and efficient mixed volume. He also has code for sparse polynomial systems solving based on our sparse resultant work.