I did many fun projects during these years. The following is a partial
list. Please visit my courses page for class
projects which are equally interesting.
-
Peer-to-peer networks offer attractive features such as decentralized
computing, fault tolerance, sharing and aggregating of resources (e.g., SETI@home).
A common (and limiting) assumption on peer-to-peer network is that, in order
to achieve fair sharing and fault tolerance, all computers in the network
should be considered equal and there should be no server nor explicit structuring
in the network. Many theories and algorithms used by existing peer-to-peer
infrastructures (such as Tapestry [12], Chord [9], Pastry [7] and CAN [4])
comply with this tenet. However, such systems often show sub-optimal performance
due to the asymmetry of nodes in reality and the lack of structure among
them.
In this project, we argue that a peer-to-peer system does not have to operate
in a pure peer-to-peer fashion to obtain the advantages mentioned above.
We believe that such system can benefit from some form of internal organization
and differentiation among its nodes, thus enjoying the efficiency of a well-organized
system, while still providing users with the P2P features.
As a proof of our
belief, we proposed and simulated Brocade, a secondary overlay to be layered
on top of these systems. Brocade exploits knowledge of
underlying network
characteristics and recognizes the differences among the nodes. Simulations
were run on the GT-ITM [11] transit stub topology and
showed encouraging
results.
-
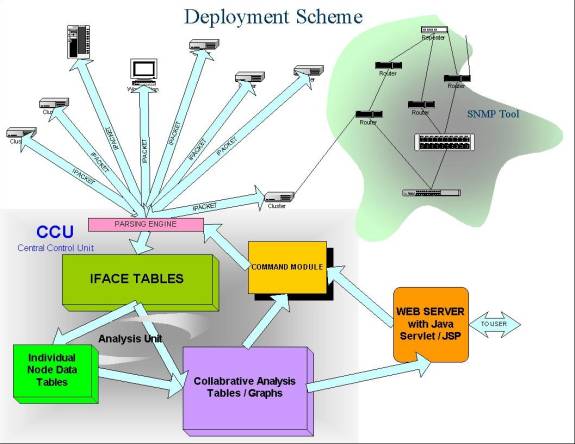
Proposed an approach (CCU/Agent) to address the increasing complexity
of managing networked systems. Implemented a tool set for monitoring system
states using SNMP and lightweight daemon processes on Berkeley Millennium
clusters.
Designed and built a system that used electromyelogram(EMG), electrical
activity that occurs in our muscles, as input to drive remote devices via
Internet. The goal was to explore novel input devices for tele-presence. It
was implemented using various analog and digital circuits, a Texas Instrument
6211 DSK board, and two computers communicating via the Internet.

This projects hardware target is a three axis closed frame milling machine with a
high-speed spindle. All of the components are off the shelf so that repair and
maintenance is inexpensive and simple. The milling machine has a sturdy all aluminum
frame. The aluminum frame is lightweight, and easy to manufacture using CNC machine
tools. The revolutionary closed frame design increases rigidity and decreases the
effect of thermal errors and Abbe' offset errors. Providing four posts for the Z-axis
to ride on closes the frame. The working volume of this machine is 3"x3"x3".
The control software provides the best performance possible in the given time. The
typical accuracy of the machine is 0.050 inches with speeds up to 15 inches per minute.
The major features of the control software are:
1. It is able to coordinate all three axes so that the cutter will move smoothly at
a velocity (also called feed in machine tool industry) as constant as possible;
2. It has the capability to cut a part with arbitrary shape and certain complexity;
3. It has a user interface that takes inputs and displays enough information.
This project investigated the application of fuzzy rule based expert system (FRBES) to the
identification of human thermoregulation system which has long been modeled as a crisp
controller without adaptation by earlier approaches. In this project, human body is
treated as an adaptive fuzzy logic system. An additional fuzzy controller is implemented
and its effect studied. A fuzzy IF-THEN rule base consisting of a set of intuitive fuzzy
rules is constructed and applied to the fuzzy thermal controller.
[Home] [Courses]
[Research] [CV]
last updated 10/04/2005