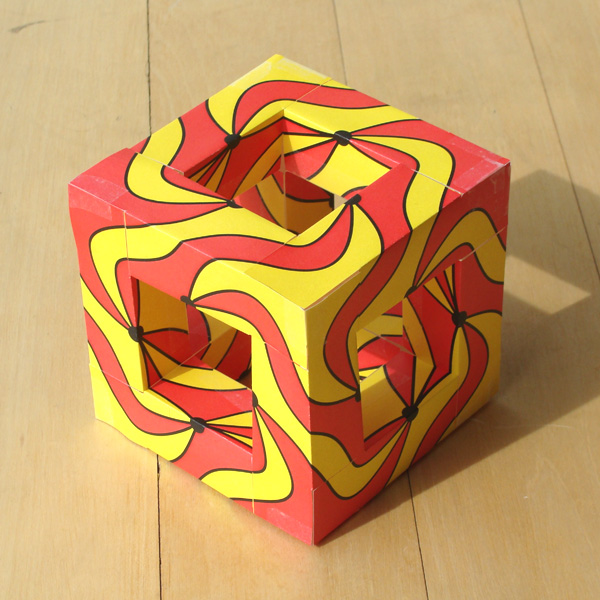

on a genus-5 cube frame.
It serves to set up the texture coordinates
so we obtain a pattern that closes nicely
around all corners and arms.
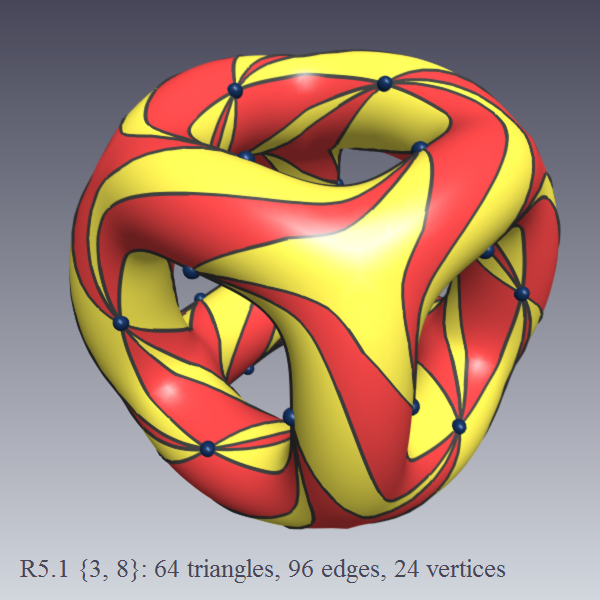
quadrilaterals with adjustable vertex coordinates;
this is a good starting point for CC-subdivision
with the goal of obtaining a nicely rounded final shape.
Little black spheres have been added
to the smooth procedurally generated surface.
Advanced rendering techniques could be used
to add shadows and specualr reflections.